
从来也不需要想起,永远也不会忘记!

盎然有生机
一个自己喜欢的人和另一个自己喜欢的人成为了一对自己喜欢的好友,有时候,感觉和杨紫和张一山的感觉。
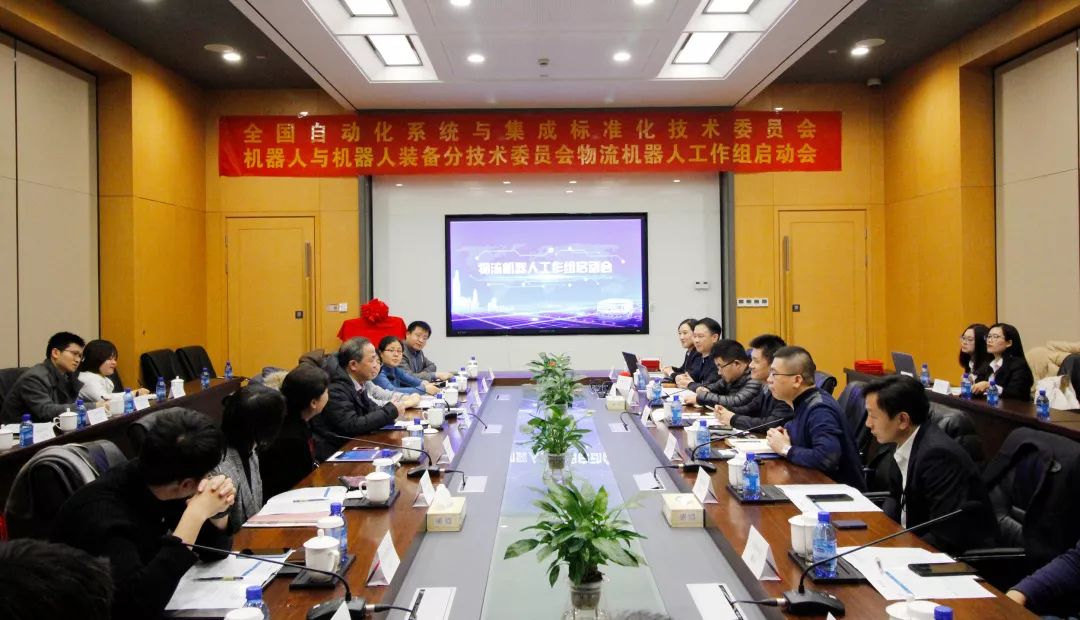
新兴产业是制造业的未来,产业发展需标准领航。随着智能制造、工业自动化和物流自动化的飞速发展,物流机器人产业呈爆发式增长。作为当代高新智能装备的代表之一,物流机器人的标准化工作不可或缺。
12月26日,全国自动化系统与集成标准化技术委员会机器人与机器人装备分技术委员会物流机器人工作组(SAC/TC159/SC2/WG15)(以下简称“物流机器人工作组”)成立大会暨第一次全体会议在杭州海康威视数字技术股份有限公司举行。
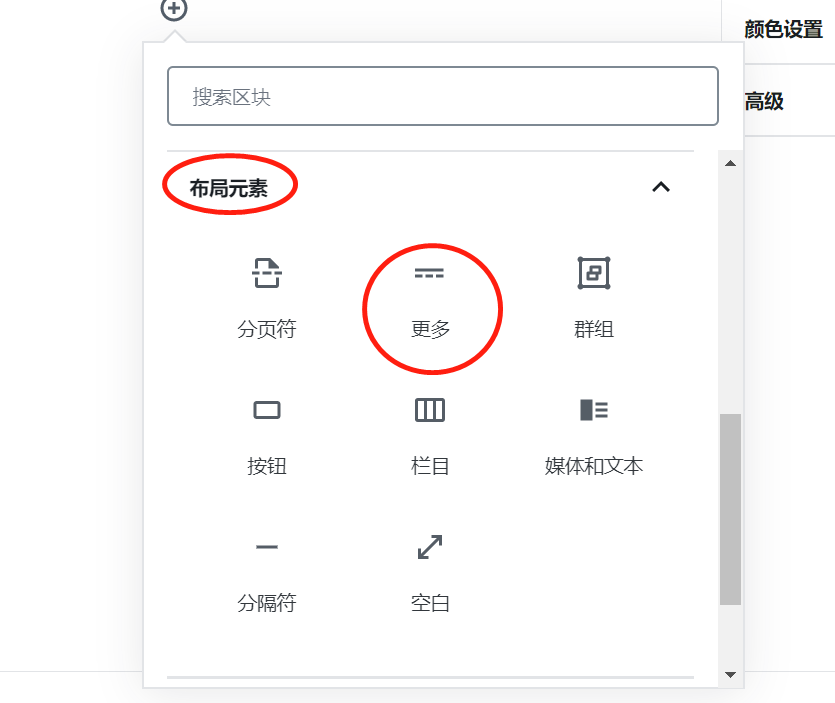
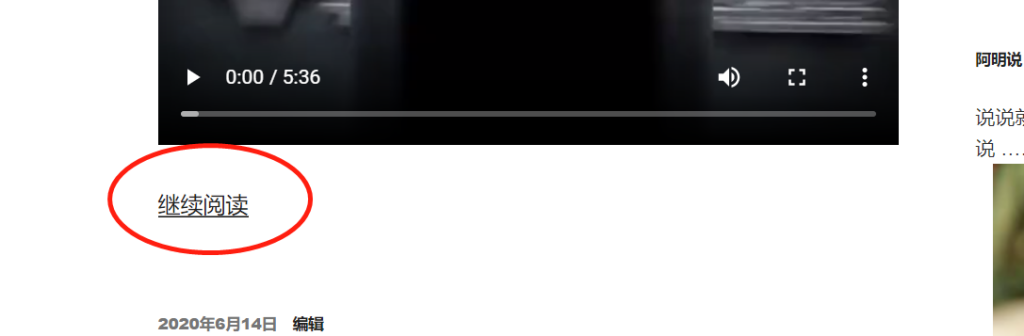
WordPress 一些模板的列表页默认会将完整的文章显示出来,有时候,我们在 wp 中添加了比较长的文章,这时,我们并不希望内容直接显示在列表页中,我们只需要在内容中添加一个 more 区块就可以了,这样的话,more区块后的内容就不会在列表页中显示,而是点击了 more 按钮后才能在详情页查看。
近年来,汽车礼让行人的呼声非常高,众多媒体和平台广泛传播,使得大众逐渐接受,相对而言,大部分司机对此表赞成态度,这里要说的是,这个事没有问题,正确且应获得支持,但需要注意的事,作为行人,在穿越人行道时,仍需时刻注意自身的安全及照顾好身边的老弱,切不可因为车让行人这一规距而忽略了必要的安全检查。
不同模块有不同的处理方式,有些重要的模块已经开启了日志,有些模块还没有。但基本上所有模块都能确定是哪个用户添加的数据。
作者:周风余,万方,焦建成… 关键词:无线传感器网络 多信道 跳频 MAC IEEE802.15.4 Zigbee 无线HART
针对家庭陪护机器人电池容量有限,工作环不连续的问题,设计一种基于机器人操作系统(robot operating system ROS)的家庭陪护机器人自主充电分级对接系统,采用卡尔曼滤波算法将编码器数据和惯性测量单元(inertial measurement unit,IMU)数据进行融合,同时结合激光雷达数据并基于 Rao Blackwellized 粒子滤波即时定位与构图(simultaneous localiza tion and mapping SLAM)算法构建环境二维栅格地图,采用 A∗ 算法和动态窗口(dynamic window approach DWA)算法进行全局路径规划和局部路径规划,使机器人行驶至充电站附近或所在房间ꎻ采用基于双重优先级的红外导航对接算法引导机器人驶向充电站,完成与充电站的精确对接ꎮ 试验结果表明,该系统有效地解决了传统方法中充电距离有限的问题,并且具有较高的对接效率、成功率、准确度和环境普适性,完全满足家庭陪护机器人的充电需求,具有较好的应用价值。
